


Skate or Die
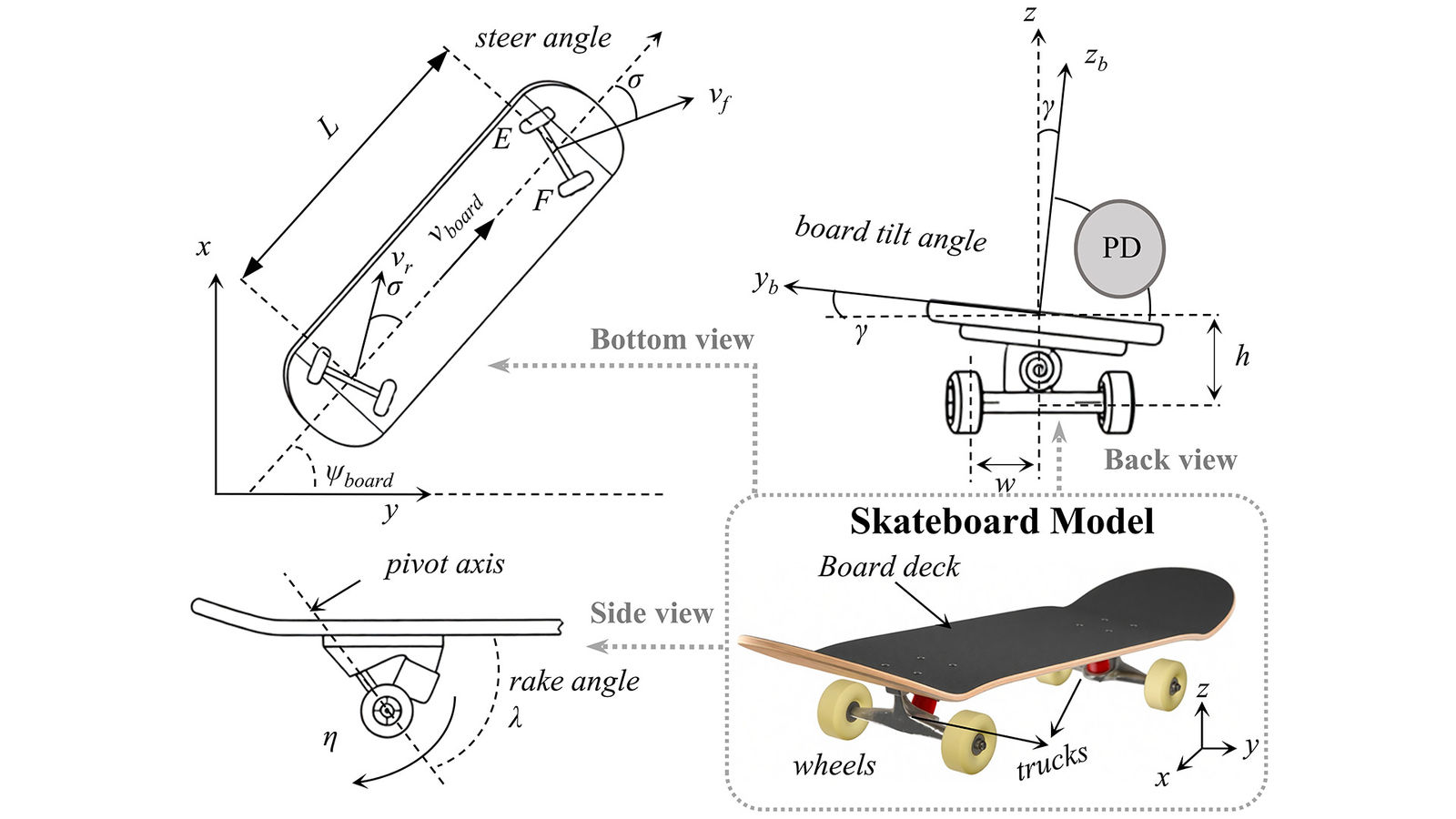
Skateboard kinematic model showing the coupling between deck tilt and truck steering. (Image: HUSKY Project)
I learned to skateboard in rural New York in the 1980s, when the best trick instructions available were a few photos with brief, inscrutably koan-like captions in the California-based Thrasher magazine. What happened between the frames was up to your imagination and tolerance for pain. The phrase “skate or die” held a double meaning—hesitation is how you get hurt, and to ride is to live. But one thing every skater quickly and viscerally encountered—without a vocabulary—was the nature of the mechanics underfoot. There is no motor, steering actuator, throttle, or brakes; it is a small plank of maple plywood bolted to two truck assemblies with wheels, and it does nothing until a body stands on it and begins precarious negotiations with gravity.
This makes the skateboard a peculiar engineering problem. In most robotic locomotion—wheeled, legged, tracked—the robot controls its own actuators directly. Command a motor, get a response. But researchers from China Telecom’s TeleAI Institute recently built HUSKY, a Humanoid Skateboarding System via Physics-Aware Whole-Body Control (RSS 2026), that does something fundamentally different. It rides a skateboard. All control authority must pass through a chain of passive, compliant, nonlinear elements the robot cannot modify—only learn to work with.
Consider what happens when a skateboarder turns. The rider shifts weight, tilting the deck. The tilt loads the polyurethane bushings in the truck, which deform progressively and allow the hanger to pivot around the kingpin. The pivot-axis geometry converts that tilt into a coordinated rotation of the axle. The wheels change heading. At no point does anyone command anything. The rider’s body is the actuator, the bushing is the compliant element, and the ground reaction at the contact patch is the output—a chain of physics that only responds to forces.
The HUSKY team formalized this as a coupling equation mapping tilt angle to steering angle through the pivot-axis geometry—the foundation of the robot’s control strategy. Electric motors driving through reduction gearboxes at the hips, knees, and ankles produce coordinated torques that must travel that same passive chain—rigid links to feet to deck to bushings to contact patches—before anything turns. Every link is a power transmission element. None of them take orders.
So what happens when your actuator and your output are separated by a compliant interface you don’t control? The robot cannot stiffen the bushings mid-ride. It cannot change the kingpin angle. It can only generate torque and send it down the chain, trusting physics to deliver. The team characterized each board’s compliance by tilting the deck, releasing it, and measuring the free-decay oscillation to extract torsional stiffness and damping—classical vibration analysis applied to a skateboard truck. Get the model wrong and the results are concrete: apply the compliant board’s parameters to the stiff board, and the robot cannot even mount, because the real deck refuses to tilt under its step. Reverse the mismatch, and it over-leans and falls.


 Power Transmission Engineering is THE magazine of mechanical components. PTE is written for engineers and maintenance pros who specify, purchase and use gears, gear drives, bearings, motors, couplings, clutches, lubrication, seals and all other types of mechanical power transmission and motion control components.
Power Transmission Engineering is THE magazine of mechanical components. PTE is written for engineers and maintenance pros who specify, purchase and use gears, gear drives, bearings, motors, couplings, clutches, lubrication, seals and all other types of mechanical power transmission and motion control components.