We use cookies to provide you with a better experience. By continuing to browse the site you are agreeing to our use of cookies in accordance with our Privacy Policy.
Home » Weiss Challenges Axis of Power, Efficiency of Cost With 3-Axis Design
Weiss Challenges Axis of Power, Efficiency of Cost With 3-Axis Design
April 23, 2015
In an effort to advance palletizing applications that do not require the traditional SCARA (Selective Compliance Assembly Robot Arm) system’s 4-axis design, Weiss has designed an economically advanced 3-axis design solution.
Tradtional, tried-and-true SCARA robots remain a popular solution for palletizing and tray packing applications. However, their typical design configuration features four axes consisting of two rotary axes and one lifting swivel unit−which is generally not needed for most palletizing applications.
In terms of figures, a SCARA robot costs on average around the same, per axis, as a Weiss 3-axis solution. Eliminating the fourth axis when only 3-axis are required is more cost effective. Additionally, the work envelope of the SCARA is difficult and costly to guard. The Weiss 3-axis system offers a compact envolope allowing for a more cost effective safety solution.
The advantage of Weiss's 3-axis system is that end-users only pay for what they actually need. Thus, procurement costs for the three axes are lower when compared with a 4-axis SCARA.
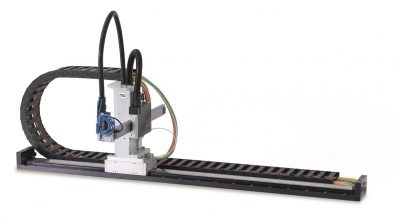
The key to this handling solution relies on standard components that have been proven in thousands of applications and can be combined to create perfectly matched sub-systems. For this specific palletizing example, Weiss selected a type HN 100 linear motor axis as the basic axis.
Permanently connected to the basic axis is the HP series direct-drive pick & place module − which forms the 2nd and 3rd axis. Unlike a SCARA robot, the strokes of the axes can be matched to the dimensions of the tray.
Vital efficiency advantages in the assembly process also come to the forefront when comparing the work process of the two concepts.
The operating range of a SCARA robot is limited to a semi-circle in front of it−however, the standardized DIN pallet is always rectangular. This means the SCARA robot is often seen with only three pallets, which just fit into its working range. This semicircular arrangement then makes it difficult to achieve linear 'advancing' of the pallets within a fully automated assembly process − as is the norm in modern, flowing conveyor belt production processes. Furthermore, once pallets of different sizes come into play, the system has severe difficulties. A square pallet does not fit in with a curved robot action radius. As a result, manual intervention is often the only option which may include: relocating, rearranging, or completely exchanging the pallets.
In the SCARA scenario, there is usually only one response to this − using one robot for assembly and one for removal. This translates to a total of eight axes − with each axis costing roughly $3,250 per unit.
Given the combination of various handling and axis units, the Weiss automated process is more flexible. For example, two pick and place units can be positioned on a basic axis with a length of up to 4 m and can work independently of each other. Instead of eight axes, only six are required. The customer effectively pays for six axes (basic axis with two carriages and two pick and place units) and utilizes the rail of the basic axis twofold.
For processes where time is not a factor, the second pick and place module is not even needed. The remaining module on the long basic axis takes care of both assembly and removal.
The design principle of a SCARA robot requires the use of different gears − whereas the handling solution from Weiss operates completely without gears, which is made possible by linear drives. This gearless design makes the handling system more precise than the SCARA robot − which offers positioning with an accuracy of up to 0.01 mm, whereas the conventional SCARA can only manage 0.05 mm or more.
Eventually with age, the imprecision increases further due to wear on the gears. The smaller the parts, the more significant this becomes. Greater precision notably pays off even for parts with an edge length of under 100 mm. The time-consuming processes required by the SCARA robot for its image processing system and position correction are no longer necessary.
Weiss's 3-axis system provides a myriad of combinations that are more economical than SCARA robots for a multitude of handling tasks.
While designed for palletizing and tray packing applications, the 3-axis system can also be leveraged for a wide range of associated applications including automotive, medical, inspection and electronics. The system is currently being used for the inspection of circuits in the production of electronic cigarettes.
Importantly, end-users can leverage the Weiss Application Software (WAS) to enable simple and intuitive commissioning of the system’s most important parameters. This makes life easier for smaller and medium-sized plant engineering companies in particular. In contrast, the programming process for the software of a SCARA robot is still a barrier for these firms.
Finally, the axis combinations are not only easy to commission − the demounted individual modules can also be used in other automation processes at a later stage. This may take some time to pay off, but significant dividends are ultimately achieved.