We use cookies to provide you with a better experience. By continuing to browse the site you are agreeing to our use of cookies in accordance with our Privacy Policy.
Lower-cost motor technologies exist that can be an attractive alternative to neo-based BL PM motors - and are not subject to unpredictable supply chains
Almost no day passes without a major news article that discusses the very real possibility that China may use its rare earth supply as a weapon in the ongoing trade war.
Neodymium and related rare-earth materials are key elements in the manufacture of powerful magnets that are used in many products — from consumer electronics, medical equipment, and automotive components to military weapons. Thus, any disruption of the supply of rare earth commodities will have a far-reaching impact on our lives.
First, what are rare-earth materials and why can we not mine them in the U.S.? The rare-earth materials that we are mainly concerned with in this article are the elements neodymium dysprosium and praseodymium. As mentioned, these are the key components in the manufacture of powerful magnets which in turn are used in many products. The actual raw materials are available in several countries, i.e — Russia, China, Thailand and the U.S.
In fact, the U.S. has a large supply of these materials that could be readily mined. However, mining rare-earth materials is a “dirty” process and often not environmentally friendly. This, in combination with the high cost of complying with environmental regulations, has made the domestic production of these minerals not economically viable.
It must also be understood that even if we relaxed these regulations and raised the price of rare-earth materials, it will take 5-10 years to start viable commercial mining and production of a domestic rare-earth supply. In the meantime, we are forced to rely on foreign supplies — or find alternate technologies that do not require rare-earth magnets.
In this article we will focus on a type of electric motors that is one of the main consumers of rare earth magnets. Neodymium magnets contain several rare-earth materials in different ratios that will impact the characteristics of these magnets, such as energy product, temperature stability, etc.
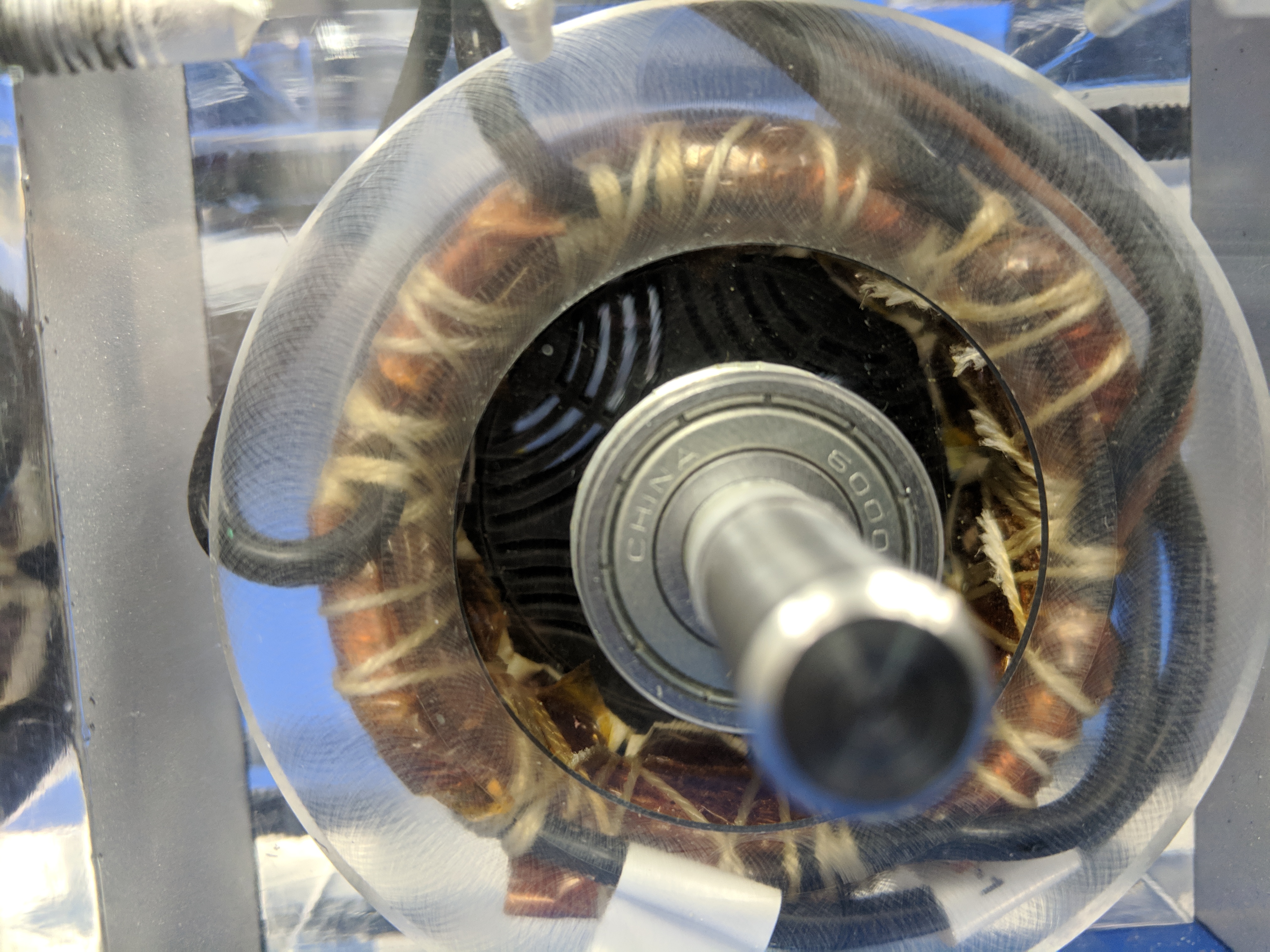
Drawing of a 4-phase motor (all photos courtesy of George Holling).Let us first briefly review the different, applicable types of electric motors: AC induction (AC), synchronous AC, brush DC, brushless DC/AC (BL DC, BL AC), internal permanent magnet (IPM), variable switched reluctance, or simply switched reluctance (VSR) and the synchronous reluctance motor (SYR). There are, of course, many variants and semantic variation, e.g. — the IPM is also called a permanent magnet (PM)-assisted reluctance motor.
The ACI is a widely used motor that is, partially due to its simplicity, and partially due to the fact that it can run directly off a power line without requiring any control electronics, a very low-cost solution with moderate efficiency (80% for single-phase motor and low 90% for 3-phase motor).
Switched reluctance motor.Most everybody will be familiar with the AC induction motor; it is widely used as a single-speed motor and also as a traction motor in electric vehicles. The ACI requires at least two phases to develop starting torque. Three-phase motors will start from the line but may exhibit large starting current, and so start-up circuits are often added. The single-phase ACI is actually a 2-phase motor with a primary winding and an auxiliary winding — both of which are powered from the main line — but a capacitor is added in the auxiliary winding to produce a phase shift which thus allows the motor to start. Once the motor starts, the main phase will keep the motor running and the auxiliary winding is often disconnected via a centrifugal switch. The main drawback of the ACI is that it will only run at a single speed — unless controllers are added.
The brush DC motor is a low-cost motor type that we all remember from our childhood, as it can be found in many toys. Typically, a permanent magnet or a field winding is used to generate a magnetic field and the rotor has multiple poles that are connected to the power source via a commutator. As the motor rotates, the commutator will always energize the correct windings to produce torque. If a field winding is used, this can be connected in series (series motor) or in parallel (shunt motor) with the rotor. Brush DC motors are still widely used in, for example, golf carts and automotive and industrial applications where speed control can be cost- effectively accomplished. But the commutator is subject to mechanical wear and brush motors do not allow for high momentary torque overload, as these will damage the commutator. The rotor also has a high inertia and the overall efficiency a low (low 60% - low 80%), which renders the brush DC motor less than well-suited as an industrial servo motor.
The brushless PM motor has replaced many ACI and brush motors, and it is becoming the motor of choice for many important applications, such as traction motors in EVs, industrial automation, robotics and military systems. A magnet — typically a high-energy magnet — is placed on the rotor and the stator is similar to that of the ACI, except that a controller is used to determine the rotor position and to then energize the stator windings accordingly — either with a sine wave (BL AC) or a fixed current/voltage (BL DC). It must be noted that there will be some method of feedback to determine the rotor position and then energize the windings accordingly; therefore, this is an electronically commutated motor (ECM). It is also possible to simply apply a rotating field to the stator and then let the rotor follow this field, which is called a synchronous AC motor. A synchronous motor is less efficient and it must have — often significantly — more torque than the application requires in order to prevent it from falling out of synch. The BL AC motor is often called a synchronous motor, but that is incorrect; the BL AC motor is an ECM versus a synchronous motor. While the PMBL motor offers high efficiency (94% -98%), small volume, and light weight, it does, however, require a controller and often a feedback device that adds cost and complexity to a PMBL drive system.
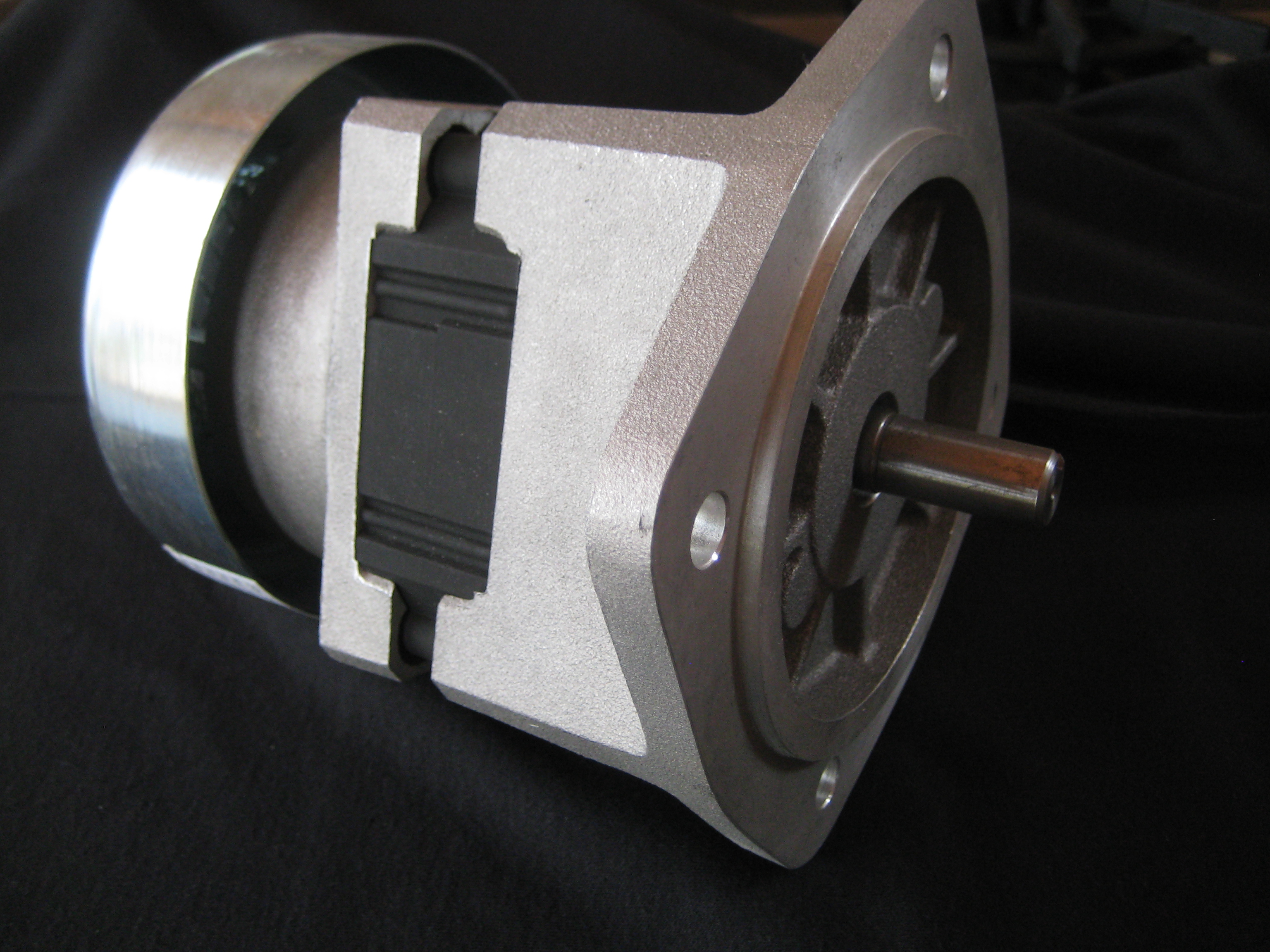
Key SR element switched reluctance motors.The switched reluctance motor (SR) or, more correctly, the variable switched reluctance motor (VSR), is also a brushless motor that requires no internal magnets. The VSR has a stator where each coil is centered around a single tooth and a stator with a simple tooth structure. When a winding is energized, the rotor will align itself with the exciting teeth and, as it approaches this equilibrium, the coils are switched and the rotor will be attracted to the neighboring teeth. The VSR offers high power density and good efficiency (94% - 96%). But the VSR has some drawbacks; most often noted is its acoustical noise signature or audible noise that can be higher than that of other motor types. The VSR also requires a specialized controller where each motor phase is connected with two leads, rather than the one phase lead commonly found in the other motors. Furthermore, the VSR features a smaller air gap and requires tighter mechanical tolerances than other motor types, which can also add manufacturing cost.
The SYR is an emerging technology that has been known about for over 20 years — but has only recently attracted attention. The stator of the SYR is similar to an ACI or PM AC motor, but the rotor is simply a solid rotor with stamped slots that create a flux barrier and channel the flux through the rotor. Another construction uses laminated material in the x-y direction, but that is not practical to implement, although some researchers have shown it to work.
The SYR requires a controller — just like the PM BL motor. In fact, with minor software changes it can utilize the same controller as the BL PM motor. In all other respects it is also very similar to the BL PM motor, i.e. — acoustical noise — and it has been shown in many studies to offer a lower manufacturing cost than the BL PM motor. For smaller needs, (< 1HP), the SYR may offer slightly lower operating efficiency (upper 80% - 95%), compared to a rare earth BL PM motor, and it requires slightly better mechanical tolerances — but it will out-perform ACIs. We do not yet have sufficient data to compare the maximum operating efficiency for larger SYR motors, but we expect these to come closer to those of BL PM machines. The SYR also operates at very high efficiency — at speeds of 50 KRPM and higher — where it may actually out-perform a similar-sized BL PM motor.
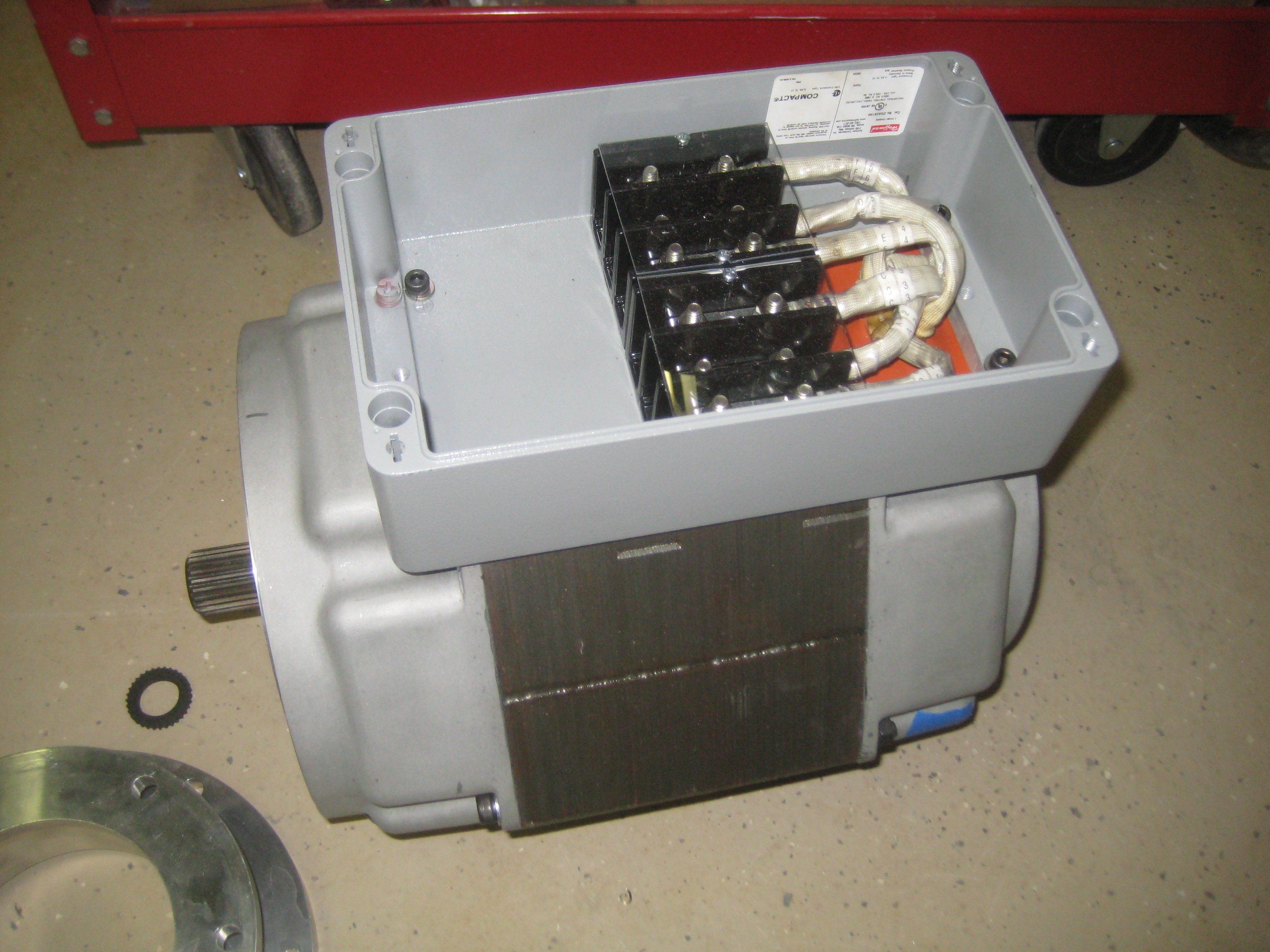
65 KW IPM motor.The last motor type that we will discuss here is the internal permanent magnet motor. The IPM has a stator similar to the ACI and BL AC motor, and it has magnets that are embedded in slots in the rotor. The IPM is a hybrid between a BL PM (PM) and a SYR (rotor slots, flux barrier) motor, and therefore requires a controller, the appropriate control software, and somewhat tighter manufacturing tolerances. However, the IPM is probably the most efficient and highest-power density motor available to us today. While we will discuss this in greater detail in Part II of this article, it should be noted that a powerful and efficient IPM can be constructed — even if less-powerful magnets are employed in its construction, e. g. — ferrite or samarium cobol magnets — where the supply is not monopolized by China. Utilizing alternate magnets in the construction also allows for the design of very high operating temperature motors, unlike those that use neo-magnets that limit the maximum operating temperature.
Now that we have reviewed the available motor technologies, we will compare these motors in greater detail in Part II of this article and highlight how alternate motor technologies can be an attractive alternative to neo-based BL PM motors that are not subject to unpredictable supply chains.
Also in the second part we will focus on the SYR motor and the IPM with magnets that do not contain rare-earth materials and can be produced in the U.S.